Quantitative Big Imaging
Kevin Mader
27 March 2014
Course Outline
Literature / Useful References
Previously on QBI ...
Outline
Learning Objectives
What did we want in the first place
To simplify our data, but an ellipse model is too simple for many shapes
So while bounding box and ellipse-based models are useful for many object and cells, they do a very poor job with the sample below.

Distance Maps: What are they
A map (or image) of distances. Each point in the map is the distance that point is from a given feature of interest (surface of an object, ROI, center of object, etc)

Distance Maps: Types
Using this rule a distance map can be made for the euclidean metric

Similarly the Manhattan or city block distance metric can be used where the distance is defined as \[ \sum_{i} |\vec{x}-\vec{y}|_i \]

Distance Maps: Precaution
Distance Maps

We can create 2 distance maps
Foreground \( \rightarrow \) Background
- Information about the objects size and interior
Background \( \rightarrow \) Foreground
- Information about the distance / space between objects


Distance Map
One of the most useful components of the distance map is that it is relatively insensitive to small changes in connectivity.
- Component Labeling would find radically different results for these two images
- One has 4 small circles
- One has 1 big blob



Distance Map of Cell
Foreground

Background

Skeletonization / Networks

Skeletonization
The first step is to take the distance transform the structure \[ I_d(x,y) = \textrm{dist}(I(x,y)) \] We can see in this image there are already local maxima that form a sort of backbone which closely maps to what we are interested in.

By using the laplacian filter as an approximate for the derivative operator which finds the values which high local gradients.
\[ \nabla I_{d}(x,y) = (\frac{\delta^2}{\delta x^2}+\frac{\delta^2}{\delta y^2})I_d \approx \underbrace{\begin{bmatrix} -1 & -1 & -1 \\ -1 & 8 & -1 \\ -1 & -1 & -1 \end{bmatrix}}_{\textrm{Laplacian Kernel}} \otimes I_d(x,y) \]

Creating the skeleton
Skeleton: Different Thresholds


Skeleton: Pruning

Skeleton: Junctions
With the skeleton which is ideally one voxel thick, we can characterize the junctions in the system by looking at the neighborhood of each voxel.

As with nearly every operation, the neighborhood we define is important and we can see that if we use a box neighborhood vs a cross neighborhood (4 vs 8 adjacent) we count diagonal connections differently

Skeleton: Network Assessment
Skeleton: Tortuosity
Thickness Map: What is it?
 Taken from [1]
Taken from [1]
- The image shows a typical object
- The sphere centered at point \( p \) with a radius \( r \) is the largest that fits
Application
- Ideal for spherical and cylindrical objects since it shows their radius
- Also relevant for flow and diffusion since it can highlight bottlenecks in structure
Thickness Map


Thickness Map


Thickness Map From Skeleton

From Skeleton vs All Points
user system elapsed
4.366 0.081 4.464

user system elapsed
13.735 0.413 14.224

Statistically Does it Matter

How much can we cut down
user system elapsed
1.813 0.027 1.841


| id | Full Map | Skeleton Map | Tiny Skeleton Map |
|---|---|---|---|
| Min. | 0.75 | 1.75 | 2.02 |
| 1st Qu. | 2.47 | 2.47 | 2.50 |
| Median | 2.66 | 2.66 | 2.66 |
| Mean | 2.67 | 2.74 | 2.77 |
| 3rd Qu. | 3.01 | 3.01 | 3.01 |
| Max. | 3.20 | 3.20 | 3.20 |
Thickness in 3D Images
While the examples and demonstrations so far have been shown in 2D, the same exact technique can be applied to 3D data as well. For example for this liquid foam structure

The thickness can be calculated of the background (air) voxels in the same manner.
With care, this can be used as a proxy for bubble size distribution in systems where all the bubbles are connected to it is difficult to identify single ones.

Watershed

Watershed: Flowing Downhill
So we start by distributing pixels all across the image

If any of the neighbors have a higher distance (more downhill) then move to that position

Watershed: More flowing


Watershed: Regrowing

Curvature
Curvature is a metric related to the surface or interface between phases or objects.
- It is most easily understood in its 1D sense or being the radius of the circle that matchs the local shape of a curve
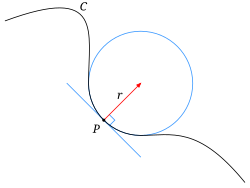
- Mathematically it is defined as
\[ \kappa = \frac{1}{R} \]
- Thus a low curvature means the value means a very large radius and high curvature means a very small radius
Curvature: Surface Normal
In order to meaningfully talk about curvatures of surfaces, we first need to define a consistent frame of reference for examining the surface of an object. We thus define a surface normal vector as a vector oriented orthogonally to the surface away from the interior of the object \( \rightarrow \vec{N} \)


Curvature: 3D
Curvature: 3D Examples
Examining a complex structure with no meaningful ellipsoidal or watershed model. The images themselves show the type of substructures and shapes which are present in the sample.

- gaussian curvature: the comparative amount of surface at, above, and below 0
- from spherical particles into annealed mesh of balls
